中国建筑第二工程局有限公司 江苏省淮安市 223299
摘要:塔吊是建筑工地上必不可少的一种起重设备,主要用于建筑施工中物料的垂直和水平输送,具有使用范围广、回转半径大、起升高度高和施工效率高等特点。塔吊工作于多样的施工场合中,自身结构较复杂、作业环境恶劣,一旦出现塔机安全事故,将严重危害人身及财产安全,因此塔机运行的安全问题备受人们关注。本文主要针对塔吊在线安全监控系统进行简要分析。
关键词:塔吊;在线安全;监控系统
1塔吊的应用与组成
塔吊(塔式起重机)是现代建筑业起重、运输、吊装作业的主导机械,起源于西欧,第一项有关建筑用塔吊专利颁发于1900年[1]。我国的塔吊行业起步于20世纪50年代,2002年成为世界上首个塔吊年产量突破10000台的国家[2]。目前我国取得生产许可证的塔吊生产厂达400余家,仅黑龙江省建筑工地运行的塔吊在8000到10000台,并以每年近千台的数量增加。塔吊可以分为基础、塔身、顶升、回转、起升、平衡臂、起重臂、起重小车、塔顶、司机室、变幅等部分。基础是塔吊安装在地面上的部分;塔身是塔吊的身子,也是升高的部分;顶升是使得塔吊可以升高的部分;回转是保持塔吊上半身可以水平旋转的部分;起升机构用来将重物提升起来的部分;平衡臂架是保持力矩平衡的部分;起重臂架是提升重物的受力部分;小车是用来安装滑轮组和钢绳以及吊钩的,是直接受力部分;塔顶是用来保持臂架受力平衡的部分;司机室是操作的地方;变幅是使小车沿轨道运行的部分。
2塔吊事故及监控现状
近年来塔吊运行安全事故频繁发生,仅2007年塔吊倒塌事故就发生16起事故,死亡65人。在发生的事故中各种塔吊违规超限操作、超载作业是主因,部分建筑企业赶工期、抢进度,违规超重、超力矩起吊作业,致使塔吊结构疲劳失稳,发生塔吊群干涉碰撞。目前塔吊作业多应用机械式限位装置保护,性能一般,而且施工单位屏蔽破坏限位装置几近常态;安装塔吊记录仪、塔吊黑匣子进行监测[4],采用的是封闭式的记录方式,容易遭到屏蔽破坏难于监管,主要用于事故滞后分析,意义不大。由于目前塔吊数量众多、高空作业、违规操作行为隐蔽且难于取证,建筑监管部门希望能够远程实时获取塔吊运行状态信息,以保证对塔吊运行状态进行有效监控。
3监控策略
鉴于塔吊安全事故的分析、总结,提出一种将“人的不安全行为”和“机的不安全状态”列为重点监管对象的塔吊在线安全监管策略,同时也考虑风速等环境变量,该策略如图1所示。
.png)
图1 塔吊在线安全监管策略
该策略将与塔吊有关联的驾驶员、工地安全员、租赁公司人员、维保人员全部纳入到系统中进行监管,有效管控“人的不安全行为”。同时将“机的不安全状态”也纳入监管。该策略的要点在于人脸识别的实名制管理业务流程的实现。人脸识别流程如图3所示。通过实时比对司机的人脸特征信息,排除非法司机和非法操作塔吊的现象,达到在线监管塔吊的目的。在塔吊的使用过程中,维保是一个重要环节,但维保作假现象比较普遍,难于监管。本系统建立了维保管理模块,将保障塔吊的维保工作落到实处。塔吊监控系统会根据设备的安装时间和使用情况,定期向维保单位发送维保提醒,而维保人员则需要到现场进行维保,且待维保结束后,还需要在监控系统中登记。登记后,维保结果会发送给项目部的管理人员,待项目部人员核实后,一次维保过程完成。同时系统还会将维保相关信息记录到数据库中。维保流程如图4所示。
.png)
图3 维保流程
同时,还将加节加高、拆卸和转场纳入监管过程中。当安装人员将塔吊安装完毕、加节加高和转场后,需要在此系统中确认。由于维保人员需要持证到现场维保,同时维保记录还会在系统中实时体现,大大降低了维保作假的可能性。维保过程中出现异常状态后,系统会自动锁车,只有派人员到现场核实通过后才能开车。安装、加节加高、拆卸和转场过程中,系统严禁塔吊运行,以保证安全。
4监控设备
为实现上述在线安全监控策略,特研发了安装于塔机的在线安全监控设备。图5所示为塔吊在线安全监控设备功能框图。监控设备采用灵活的模块化设计思路,每个功能模块均可通过拔插方式接入或者退出系统。控制主机能外接高度传感器、幅度传感器、载重传感器、风速传感器和回转传感器等。
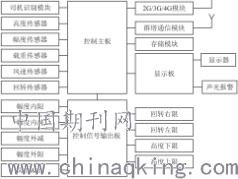
图4 监控设备功能框图
(1)高度传感器可实现塔吊吊钩的高度测量,将吊钩的高度信息实时传递至控制主机,控制主机采集到高度信息后,按照控制逻辑进行相应的处理。
(2)幅度传感器将塔吊小车在塔吊悬臂上与塔基的距离信息实时传递至控制主机。
(3)载重传感器作为塔吊重要的传感器,实时采集塔吊的吊重信息并传递至控制主机,作为力矩超载的判别依据。
(4)风速传感器感知塔吊所在环境的风速,风速超过设定预警值时,司机不可操作塔吊。
(5)回转传感器实现塔吊绕着自身塔基旋转的角度测量功能,是塔吊区域防碰撞、群塔间防碰撞的重要依据。2G/3G/4G模块将控制主机的信息上报给平台,将平台信息下发至控制主机。使用群塔通信模块可实现群塔防碰撞功能。当塔吊离线时,离线数据存储在存储模块里,当某时塔吊上线后,将离线时的数据补传至监控平台。
监控系统还设计有控制信号输出模块。该模块接收控制主机的控制信号,输出9路继电器信号,实现塔吊幅度内减、幅度外减、幅度外限、幅度内限、高度减速、高度下限、高度上限、回转左限和回转右限等功能。
为了能够方便操作、配置参数和查看数据,监控设备带有液晶显示器。当有预警和报警信号时,声光报警电路会进行相应的声音和发光报警。
人脸识别设备通过RS232与控制主机连接,实现塔吊操作人员的人脸识别。人脸识别设备因其结构安装和识别位置要求较高,需要具备灵活安装的能力。
施工工地某些区域存在高压线、建筑物等影响塔吊正常运行的区域,一般将其设定为塔吊禁行区,启用禁行区规避功能。在塔吊密集布置的区域,需要启用群塔通信功能,通信模块的通信距离约1km,以保证通信的可靠性,实现群塔防碰撞功能,减少和规避塔吊之间的碰撞事故。
为降低在线安全监控设备的自身维护成本,必须考虑设备的设计可靠性。塔吊自身较高,安装环境恶劣,易受塔吊电磁环境、雷电、阳光、雨水、粉尘等影响,设备设计时应考虑采取防雷措施、接地措施及EMC、防水、防尘、防阳光照射老化问题等。
为实现现场维护、检查、执法的方便性,设计了手持设备,可通过无线传输方式实现塔吊现场与控制主机的通信,将使用者关心的数据从控制主机上下载到手机设备,同时也能将指令上传到控制主机。手持设备大大减少了攀爬塔吊的次数,也提高了现场巡查效率。
5监控管理平台
远程监控管理平台由应用服务器、数据库服务器、Web服务器以及Web浏览器组成。在线安全监管设备通过移动网络与远程监控管理平台通信,发送塔吊的工作状态信息、人员信息到远程监管平台,接收远程监控管理平台发送的远程控制指令。用户通过登录远程监控管理平台查询、管理和控制塔吊的状态。塔吊远程监控平台为使用者提供了互动管理界面。
6结束语
综上所述,本文从人-机-环境角度出发,提出了一种将“人的不安全行为”和“机的不安全状态”列为重点监管对象的塔吊在线安全监管策略及系统。设计了在线安全监控系统,描述了系统的总体架构,阐明了系统的硬件设备和软件流程,验证了系统的可行性。系统针对当前普遍存在的驾驶员识别不利于现场快速调查取证和人员排查的情况,采用人脸识别技术提高了系统的实用性和兼容性。同时对事故多发易发的塔吊安装、加高、拆卸阶段进行了深入研究并将其纳入监管。实际应用表明,该系统实现了对塔吊“人的不安全行为”和“机的不安全状态”的全方位监管,具有良好的应用前景与市场推广价值。
参考文献:
[1]塔吊远程安全监控系统的研究与设计[J].戚本志,焦春奇,戚莹.价值工程.2018(03)
[2]计算机安全监控系统的技术[J].曾峰.电子技术与软件工程.2017(23)
[3]计算机安全监控系统的关键技术研究[J].陶伟,李震.黑龙江科技信息.2017(09)
[4]浅谈计算机安全监控系统技术[J].郑晓梅.黑龙江科学.2017(06)
论文作者:王江峰
论文发表刊物:《防护工程》2018年第26期
论文发表时间:2018/12/17
标签:塔吊论文; 在线论文; 监控系统论文; 传感器论文; 系统论文; 主机论文; 不安全论文; 《防护工程》2018年第26期论文;