摘要:智能交通领域中,由于行人运动、方向的不确定性和光照等不良因素的影响,目前跟踪算法很难满足实时性和稳定性的要求。通过对行人目标运动图像的分析,结合机器学习领域最新发展,提出了一种基于改进的核相关滤波的行人自动跟踪方法。利用行车记录仪拍摄的行人穿越马路视频验证了检测速度和误差均能够满足实际应用需求。
关键词:目标跟踪;核相关滤波;智能交通;均值偏移
一、引言
近年来,计算机视觉中非常热门的目标跟踪技术被引入到智能交通领域,并渐渐发挥出它特有的优势,尤其是在交通参与者轨迹自动跟踪方面贡献突出,引起了很高的关注。但在交通领域中,因为拍摄环境和图像质量的影响,该方法对于行人目标的跟踪仍然存在着一些缺陷,比如目标大小变化、拍摄角度不佳、光照不佳和背景与目标相似等,都使目标跟踪算法仍然具有挑战性。
Zdenek Kalal[1]等提出了一种新的目标跟踪算法(tracking-learning-detection,TLD),TLD解决了被跟踪目标在被遮挡或在摄像机视野里消失后无法重新捕获的难题;Henrique等提出核相关滤波器(kernelized correlation filters,KCF)目标跟踪算法[2],在同一个测试数据集上,KCF的平均运行速度可达数百帧每秒,而TLD的平均运行速度只有二十几帧每秒,可见KCF算法具有较好的跟踪效果。
但是,上述目标跟踪方法没有对目标的大小进行预测,或者跟踪性能和效果很差,不能满足现实需要,这在很大程度上降低了跟踪效率,缺乏广泛的适用性[3]。
我们创新性提出了一种改进的KCF算法,通过改变候选框尺寸,精确定位行人位置,很好的满足了跟踪算法准确性和实时性的要求。
二、改进的KCF算法及性能评价指标
1.KCF算法存在的主要问题
KCF算法一个重要的不足就是因为在跟踪过程当中目标框是已经设定好的,从始至终大小未发生变化,但是我们的跟踪序列当中目标大小时有改变,这就会使跟踪器在跟踪过程中目标框漂移,从而导致跟踪失败。
2.KCF算法的改进
经过第一帧行人目标的数据标定,可以确定行人的准确位置及候选框的尺寸。在接下来的跟踪过程中,将根据KCF算法得到的检测结果,分别采用①~④的动作,产生新的中点框尺寸,通过对比初始候选框的特征和5种新候选框,选择最优候选框。以上过程可以简要总结为以下几步:
Step1:数据标定,确定行人目标初始位置及跟踪框尺寸大小;
Step2:按动作①~⑤产生新的候选跟踪框,对应第一帧图像的跟踪框,仍按照核相关滤波的方法对候选框与初始跟踪框之间的接近程度进行评判;
Step3:从①~⑤跟踪框中选择上一步中最优候选框为该帧行人的跟踪结果;
Step4:读取下一帧图片,重新进入Step2。
三、实验结果及分析
1.实验平台介绍
实验中用到的视频是源于网络的行车记录仪拍摄的行人过马路视频,由其提取600张640*368大小的图片序列。实验计算机为Win1064位操作系统,16G内存+1T硬盘,处理器为Intel(R) Core(TM)i7-7700 HQ,CPUMatlab2014a+Visual studio 2013。KCF的源码来源于Github,代码链接为https://github.com/scott89/KCF,在该源码的基础上我们加入了跟踪框尺寸调节机制。
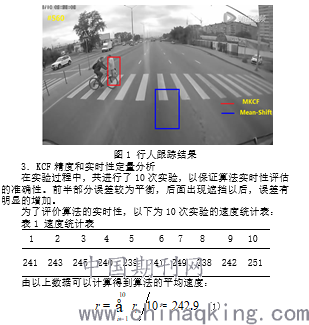
2.MKCF与Mean-shift算法结果对比
选取实验中的第560帧的行人跟踪结果如下图所示。
4.实验结果总结分析
通过以上实验结果可以看出:
(1)MKCF可以在行人通过的全过程比较准确的检测出目标,跟踪效果要优于Mean-Shift;
(2)MKCF的速度在本平台上可以达到242.9fps,能够满足实际应用场景下的行人跟踪。
(3)在行人被部分遮挡时,算法的误差有明显的增加。
四、结束语
本文分析了智能交通中的行人目标跟踪存在的问题,在此基础上结合在目标跟踪领域取得成功应用的KCF算法,提出了一种候选框尺寸可变的MKCF算法。通过在实拍数据中的应用,所提出的算法可以较为准确的形成对于目标的跟踪,算法实时性也可以满足实际应用的需求。
参考文献
[1]KALAL Z,MIKOLAJCZYK K,MATAS J. Tracking-learning-detection[J]. IEEE transac- tions on pattern analysis and machine intelligence,2012,34(7):1409-1422.
[2]HENRIQUES J F,CASEIRO R,MARTINS P,et al. High-speed tracking with kernelized correlation filters[J]. IEEE transactions on pattern analysis and machine intelligence,2015,37(3):583-596.
[3]诸小熊,江加和. 基于核相关滤波器的目标跟踪算法[J].应用科技,2017,44(3)
论文作者:孔凡杰
论文发表刊物:《知识-力量》2019年7月中
论文发表时间:2019/4/22
标签:算法论文; 目标论文; 行人论文; 提出了论文; 尺寸论文; 大小论文; 领域论文; 《知识-力量》2019年7月中论文;