(泰富重工制造有限公司)
摘要:针对现有同一料场内悬臂堆料机和桥式双斗轮取料的防撞控制方法的不足,提出一种新的防撞控制方法。引入中控PLC参与控制,获取两台设备的运行状态信息,并且在中控PLC中实现防撞控制算法,根据控制算法的结果来控制设备间防碰撞。该方法提高了系统防碰撞的可靠性,避免了人为因素导致的误碰撞,又可最大限度的利用料场进行堆取料作业。
关键词:悬臂堆料机;桥式双斗轮取料机;中控PLC;防撞控制算法;实现步骤;
1 前言
悬臂堆料机是一种大型高效散状物料堆料作业设备,广泛应用于港口、码头、矿山、等领域的散状物料存储场。正常工作时,悬臂堆料机的悬臂与轨道成90度。
桥式双斗轮取料机主要由一个像桥式起重机的金属架构和一个带斗轮的运行小车组成。取料过程是通过小车的横向运行和斗轮旋转实现的。
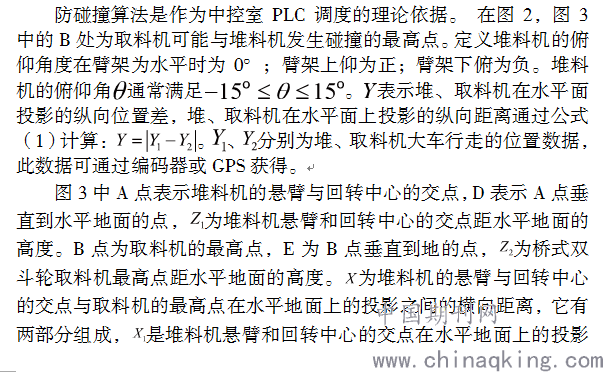
如图1所示,在大型料场3存在用悬臂堆料机6(以下简称堆料机)进行堆料作业和用桥式双斗轮取料机5(以下简称取料机)进行取料混合作业的情况。在作业时,堆料机会到取料机的另一侧进行工作,即两设备间需进行工作位置变换。由于堆料机的悬臂较长所以两设备间存在极大的碰撞的风险。现有技术存通常为堆料机运行至远离桥式取料机的地方进行回转,但缺乏运行保护实时性;且采用人工换位控制时,操作员的视野、经验对设备间防撞控制影响很大。随着检测、通讯技术的发展,降低对人工的依赖也是未来发展的方向与趋势。
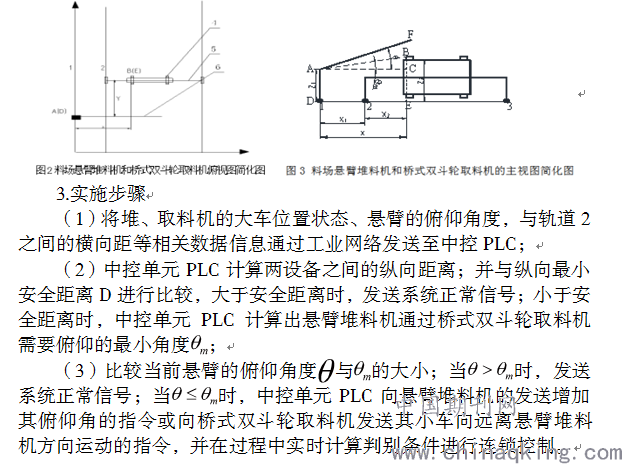
2.防碰撞算法

4 结语
本文研究的方法通过引入中控单元PLC参与控制,中控单元PLC通过工业网络堆、取料机进行信息交互,获取两台设备的运行状态信息,并且在中控PLC中实现防撞控制算法,根据控制算法的结果向堆、取料机发送控制信息,该方法在能提高了系统的可靠性,避免了人为因素导致的误碰撞。
作者简介:
冯智(1978— ),男(汉族),湖北武汉人,工程师,研究方向:散装物料设备与海工装备电气控制系统研究。
通讯作者:冯智;电话:13723885917,邮箱:2372967824@qq.com,
联系地址:湘潭市九华经济技术开发区奔驰路6号,泰富重工制造有限公司重工研究院 邮编:411201。
论文作者:冯智
论文发表刊物:《电力设备》2017年第17期
论文发表时间:2017/10/18
标签:料机论文; 悬臂论文; 算法论文; 作业论文; 料场论文; 中控论文; 设备论文; 《电力设备》2017年第17期论文;