天津港航工程有限公司 天津塘沽 300000
摘要:为进一步提高内河航道水深地形图的精确性和可靠性,本文以GPS的TRK技术作为主要研究对象,通过对GPS网络RTK技术的工作原理进行阐述和说明,进而以某内河航道实际工程为例,对该项技术在内河航道测量中的实际应用展开了深入研究。
关键词:GPS网络;RTK技术;内河;航道测量
前言:对传统的内河航道测量进行分析可知,其大都以基于全站仪的三角导线、测距导线测量以及利用交会法进行水深测量的方式来完成航道测量工作,在投入大量的人力和物力的同时也难以确保较高的工作效益。GPS网络RTK技术的产生和发展有效解决了传统内河航道测量的投入大、效率低问题。因此,本文着重对GPS网络RTK技术在内河航道测量中的应用予以探究,旨在为提高内河航道测量的工作效率和确保航道测量结果的准确性提供参考。
1 GPS网络RTK技术工作原理
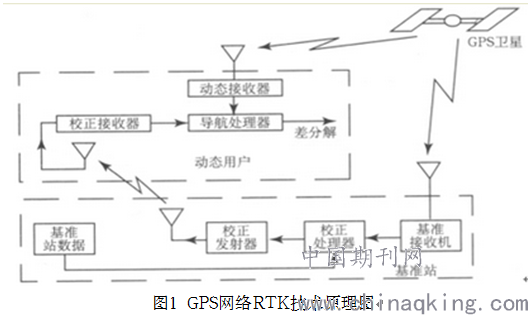
GPS网络RTK技术,即GPS的载波相位差分技术,是对两个测量占的载波相位观测两予以测量的一种差分方法。通常,GPS网络RTK测量系统由GPS接收设备、数据传输系统以及实施动态测量的软件新系统共同构成,利用GPS网络RTK技术(系统)能够对测站点在制定坐标系当中所对应的三位定位结果予以精确获取,其定位精度大达到厘米级[1]。GPS网络RTK技术工作原理如图1所示,具体分析如下:在基准站上安置一台GPS接收机,并与载体,即移动站及其基站处安置另一台或几台GPS接收机使其同时对同一时间、同一GPS卫星所发射的信号予以接收,而后,将基于基准站测得的观测值同当前已知位置信息予以对比,进而获得GPS的差分改正值。最后,利用无线电数据链电台将得到的这一改正值传至共视卫星移动站,实现对GPS观测值的精化处理,获得准确的移动实时位置。
2 GPS网络RTK技术在某内河航道测量中的实际应用
2.1工程概况
某航道始建于2005年,原属于三级航道,后因其所在地区发展需要,以二级航道标准对其进行整治,在整治过程中,需要完成修复护岸以及土方疏浚等有关工作,据航道整治的负责单位统计,本次需要整治的河道里程为69.14km,整治后的河道应满足水深4.0m、驳岸段航道的最小航宽、最小底宽与最小口宽分别为73m、58m和108m,相应的航道最小弯曲半径为536m,且这一航道在整治结束后,其通航条件将得到显著改善,且至少能够承载2000t级的船舶。在测量方面,该航道整治工程需要完成对航道的全程地形测量以及水位观测和平面控制工作,此外,还包括水深测量等。航道整治负责部门以《水运工程测量规范》为依据,将测量比例尺定为1:2000,进而展开测量。据航道整治负责人透漏,该航道测量的工期为90个工作日,在此期间,需要完成对航道3km2水域面积的测量和30km2地形面积的测量。在设备投入方面,共投入了双频GPS接收机18台,其标称动、静态精分别达到了10mm±1ppm和5mm+1ppm,单其中,移动站和基站分别为6台和3台,另配有2台经纬仪、3台笔记本电脑和1台测深仪[2]。
2.2平面控制测量
在对目标航道进行整治的过程中,从测区河道的实际情况出发,并在对《水运工程测量规范》和上级部门制定的航道整治标准予以全面考量的基础上,以D级GPS网作为航道测量中平面控制测量的首级控制网,且以8km为单位间隔在航道两岸设置一对D级点,在布置完成后,测区当中共存在D级GPS网3段,对于各D级GPS网交界处的公共边以联测为主,避免重复测量。
2.3碎部地形测量
选取GPS网络RTK技术与全站仪相结合的方式来开展目标航道的碎部地形测量工作,并开展航道地形与水深测量的同步作业,在各侧段均设置2组全站仪组和1组RTK组。需要说明的是,目标航道因岸堤处并无遮挡,故可由水边线测至两岸的大堤顶来完成航道的地形测量,具体测量方法如下:将3台基准站分别设置在屋顶以及水闸顶与航道边的小山顶处的D级点处,而后,将对移动展行初始化操作,以与其临近的已知控制点为依据对高程异常和相应的坐标转换参数予以计算,在此基础上,对碎部点的坐标予以测量。需要说明的是,在对碎部点坐标进行测量时,应保证每一碎部点均应持续观测2min以上,并以手薄机将观测到的数据予以储存,随即绘制草图[3]。最后,在结束外部作业后,以所观测到的数据为依据,对目标航道的地形图予以绘制。
2.4航道水深测量
将GPS网络RTK技术与全站仪结合,不仅能够借助电子计算机完成水深断面线的设置工作,而且也为水深点的采集与航道水深测量的成图提供了较大便利, 对于提高航道水深测量的自动化水平具有重要作用。GPS网络RTK技术的应用确保了水上与水深定位的同步性,在确保GPS天线和测深仪换能器处于同一位置的基础上,有效提高了目标航道水深测量的效率与精度。根据航道整治工作负责单位统计,在引入GPS网络的RTK技术后,航道河面的基准站数据传播距离已达到了14.5km,一方面,有效节约了传统航道测量过程中因搬运全站仪而浪费的时间;另一方面,也有效减轻了工作人员的劳动强度,即对于一艘测探艇而言,只需配备2人即可,其中,一人驾驶测探艇,另一人操作计算机开展水深测量工作,从而确保目标航道测量的日均水域面积在3.8km2以上,有效提高了人员的劳动效率。
结论:本文通过对GPS网络RTK技术的工作原理进行分析,进而以始建于2005年的某三级航道为例,分别从平面控制测量、跟碎部地形测量和航道水深测量三方面对该航道向二级航道整治过程中GPS网络RTK技术的应用做出了系统探究。研究结果表明,GPS网络RTK技术在该航道测量中的应用能够有效提高测量精度和测量效率。未来,应进一步加大对GPS网络RTK技术在航道测量中的应用力度,为促进我国航道事业的健康、稳定发展提供可靠的技术保障。
参考文献:
[1]李本超.GPS-RTK技术与测深仪结合在内河航道水下测量中的应用[J].科技尚品,2016,01(12):19.
[2]曹鸽,王玉柱.GPS、RTK、网络RTK技术在工程测量中的应用[J].北京测绘,2012,05(21):83-85.
[3]楚宝庆.小议在航道测量中GPS-RTK定位技术的应用[J].科技创新导报,2011,06(20):89.
论文作者:孙永
论文发表刊物:《基层建设》2017年第15期
论文发表时间:2017/10/9
标签:航道论文; 测量论文; 水深论文; 技术论文; 内河论文; 网络论文; 地形论文; 《基层建设》2017年第15期论文;