重庆交通大学航运与船舶工程学院 重庆 400000)
摘要:船舶操纵性是指船舶按照驾驶者的意图保持或改变其运动状态的性能,即船舶能够保持或改变航速、航向和位置的性能。
根据内河船舶特点及内河航道的特殊环境,针对双舵型内河船舶,将联动转舵机构同角度舵角转向变换为差动不同舵角转向,从而对舵机系统进行改进。
关键词:双舵船舶;差动舵角;内河航道的特殊环境;操纵性;平衡连杆
1.研究背景
内河航道是指在内陆水域中用于船舶航行的通道。内陆水域包括江、河、湖、水库、人工运河和渠道等。内河航道可分为天然航道和人工航道。天然航道系利用天然水域提供的航道尺度行驶相应尺度的船舶,如果局部河段尺度不足,则通过整治与疏浚的手段使之达到要求的尺度。
具有良好操纵性能的船舶,首先在直线航行时能够保持运动方向,其次需要转向时能迅速的改变航向,使船舶按照预定的航向航行,最后需要具有适当的停船性能。
内河航道环境复杂,相较于海洋而言航道狭窄、弯曲,对船舶的操作性有着更高的要求。由于弯曲航道多,停靠码头时空间狭窄,对船舶操纵性中的回转性而言,希望船舶能够有更好的机动性及更小的回转半径等。本文针对船舶操纵性中的回转性,对船舶转舵系统的相关问题进行探索、设计和验证。
2.设计原理
随着内河船舶应用的推广,“一带一路”建设的大力开展,团队希望可以改进内河船舶的回转性能指标,以应对相应的特殊情况,甚至减少成本。拟采用双舵差动不同舵角,使得内河双舵船舶回转半径减小,提高回转性能,从而提高内河船舶的操纵性。
取消联动同角度转舵机构,即取消两舵间平衡连杆转舵机构,利用液压或机械系统驱动,每一个舵采用独立的转舵机构,达到双舵不同角度回转,从而减小船舶回转半径。或者双舵叶间采用偏心连杆,利用液压或机械系统驱动,使得船舶转向时双舵不同角度回转,从而减小回转半径。
改善内河船舶的操纵性,减小内河船舶的回转半径,达到在特殊内河航道环境情况下,仍能够快速回转的目的。
目前,关于船舶回转性的研究方法有三种:理论方法,试验方法和数值模拟,以下所列为理论方法(船舶操纵运动方程式)坐标系与运动方程式。
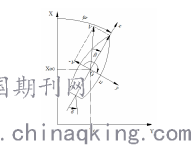
图1 船舶转向示意图
一般来说,作用在静水中航行的船舶所受到的作用力主要有两种:一种是由于船舶在运行过程中水的阻力与船舶之间的相互作用而产生的水动力和力矩;一种是由于外部环境引起的力如风作用力、波浪作用力等。
这些作用力与船舶本身的几何形状有关(如船长、质量、转动惯量以及船型参数),与船体运动有关(如螺旋桨转速、舵角),也与流体本身特性有关(如流体密度、运动粘性系数、重力加速度、表面张力系数、流体弹性模数等)。
由于船舶操纵性运动是一个缓慢的运动过程,所以我们可以大致认为船体所受到的水动力与船体历史运动状态无关,仅于当下运动状态有关。
由此得到关于 r 的运动方程:

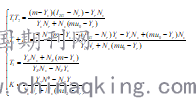
称为二阶 K—T 响应方程,用来描述船舶运动对操舵时候的响应。由于操舵运动是低频运动,故可以忽略二阶以上无穷小量,将二阶响应方程可以转化成更容易理解更简便的一阶响应方程,故上式可以改写成:

以上即为通过对线性操纵运动分析而得出的操纵方程。此法适合于操小舵角的航向较稳定的船舶的操纵运动,也可以用来分析对于单纯改变舵角而引起的各种操纵运动,还可以分析船舶多操舵的响应,用于模型试验分析。
3.创新特色
现今内河双舵船舶均为联动同舵角实现转向,本组针对这一问题,提出船舶采用差动不同舵角进行转向。对差动不同舵角转向问题进行探索,利用差动不同舵角实现减小回转半径、缩短回转时间的目的。即根据内河船舶特点及内河航道的特殊环境,针对双舵型内河船舶,将联动转舵机构同角度舵角转向变换为差动不同舵角转向,从而对舵机系统进行改进。
4.应用前景
近年来航运行业迅猛发展,船舶行业已经朝着大型化,快速化发展。
船舶的操纵性作为船舶的重要性能之一,为避免船舶碰撞,经济损失,威胁到人生安全,船舶必须要求有良好的操纵性。而船舶回转性是船舶操纵性是否良好的重要指标之一,一是因为回转运动是船舶操纵中常见的一种运动,二是因为回转运动的最后阶段是定常运动,便于进行理论分许。
回转性是指直线航行的船舶,将舵转至某一舵角,并保持此舵角,船即将做曲线运动的能力。由于内河航道的环境特殊性,随着科技的快速发展,老旧船舶逐渐被淘汰,新式船舶得到设计改善、推广和应用。
针对内河船舶,有必要也必须提高船舶操纵性,改变对舵机系统的固化思维,利用差动不同舵角,减小内河船舶的回转半径,提高回转性能。
参考文献
[1]范尚雍.船舶操纵性.北京:国防工业出版社,1988:1-18页.
[2]邹早建.船舶操纵性研究进展.第六届船舶力学学术委员会全体会议专集,江苏镇江,2006:54-57页
[3]李承建,藤野正隆,深迟塔一,双桨双舵船的操纵运动数学模型,日本造船协会论文集,1988年,第163号.
[4]Inoue, S., Hirano, M.,Kijima, K. et al A Practical Calculation Method of Ship Manoeuvering, International Shipbuilding Progress(ISP)
[5]俞胜芬,船舶操纵运动方程参数估计.中国造船,No.78,1982
论文作者:周思佳
论文发表刊物:《新材料.新装饰》2018年3月下
论文发表时间:2018/9/11
标签:船舶论文; 内河论文; 操纵性论文; 航道论文; 舵机论文; 半径论文; 差动论文; 《新材料.新装饰》2018年3月下论文;