摘要:近些年来,机器人的研发、制造、应用是衡量一个国家科技创新和高端制造业水平的重要标志,代表着未来智能装备的发展方向。目前国内的检测标准很少,大多数均采用通用标准进行检测,检测市场较为混乱,可依据的检测项目很少。本文综合考虑现有机器人的发展的特点,现有的国内国际检测标准,结合现目前汽车,机载设备等多领域的电磁兼容标准检测项目和手段,按照不同的标准和辐射强度对机器人做了试验,得到了不同情况下的试验结果,通过对实验结果的分析,给予相关的制造企业在做检测时以指导,确保生产的机器人有更好的性能和更高的可靠性。
关键词:机器人、辐射敏感度、电磁兼容、智能装备
引言:
我国检测技术发展过程中,普遍重视硬件技术,忽略或是轻视了难度大、投入多的检测方法、限值标准等基础性技术的研究。目前国内针对机器人的电磁兼容检测标准《GB-Z19397-2003__工业机器人_电磁兼容性试验方法和性能评估准则指南》也已经是2003年的标准,相对于现在迅猛发展的机器人设备,检测已经远远跟不上发展。随着机器人及智能装备上各种电控件的越来越多,电磁环境的越来越复杂,信号的越来越多样化,机器人及智能装备电控件的电磁兼容研究一直以来是各国家及制造厂家非常重视的重点。机器人及智能装备中的EMC在大多数情况下主要取决于:金属车体、连接电缆、电子控制单元、电子元器件和天线。随着检测手段的完善,与硬件相配套的检测技术软件将进一步完善。我们很有必要根据机器人的发展情况及现在的检测手段,分析现目前标准的适用性。
一、试验比对和测试背景说明
机器人目前是典型的机电一体化产品,一般由机械本体、控制系统、传感器、和驱动器等四部分组成。为对本体进行精确控制,传感器应提供机器人本体或其所处环境的信息,控制系统依据控制程序产生指令信号,通过控制各关节运动坐标的驱动器,使各臂杆端点按照要求的轨迹、速度和加速度,以一定的姿态达到空间指定的位置。对于一个典型的机器人来说,通常都由一个或多个控制器进行控制,多个传感器、通过线缆连接多个伺服电机/驱动器进行运转,为了试验的方便,我们选取一个较为简单的机器人系统进行试验,该机器人系统(以下简称EUT)设备仅包含一个控制器、一条连接线束和一个伺服电机,分别按照GB_T17626.3-2006《射频电磁场辐射抗扰度试验》(以下简称方法1)和ISO 11452-2-2004 《道路车辆.窄带辐射的电磁能量产生的电子干扰的部件试验方法-电波暗室法》(以下简称方法2)2个检测标准项目做测试并对结果做相应的分析:
二、辐射敏感度测试试验方法和对比试验结果:
EUT的工作状态:该EUT处于正常工作中时,EUT控制器上显示着电机的转速,同时EUT的电机保持转动。试验过程中,我们通过监控观看控制器上的的转速以及电机的转动速度来判断EUT是否按照设计的正常工作。
1.按照方法1的试验方法步骤和结果
1)按照标准的要求测试在电波暗室中进行,发射天线与EUT的距离为3m。测试布置如下:
.png)
2)将EUT系统置于80cm高的测试桌上。电机的连接线束按照标准的要求铺在桌上。
3)开启EUT,使EUT预热10分钟,确认EUT的工作状态,使EUT处于正常工作中。
4)通过发射天线,分别从80-800MHz,800 ~1000 MHz,1400 ~2100 MHz,2100 ~2500 MHz频率范围,使用1kHz、80%的幅度调制的,频率的扫描步进为1%,每个频率的停留时间设置为2s,测试的强度为10V/m的正弦波干扰信号,对EUT进行干扰进行扫描。记录下EUT的工作状态,看EUT是否工作异常。
5)更换发射天线的极化方向,重复步骤3,确保完成天线水平和垂直方向的干扰测试。
6)调整场强至20V/m,重复步骤4)~5),完成20V/m的干扰场强测试。
通过实验,结果如下(为简化,已将转速显示及电机转动详细的测试结果和记录做了简化描述):
测试1,场强10V/m,天线水平,转速显示正常,转速正常
测试2,场强10V/m,天线垂直,转速显示正常,转速正常
测试3,场强20V/m,天线垂直,转速显示正常,转速正常
测试4,场强20V/m,天线垂直,转速显示正常,转速正常
2.按照方法2的试验方法步骤和结果
1)按照标准的要求测试在电波暗室进行,发射天线与EUT的距离为1m。测试布置如下:
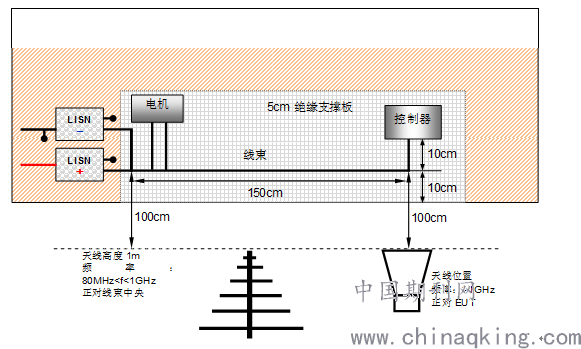
2)将EUT系统置于80cm高的测试桌上。电机的连接线束按照标准的要求铺在桌上。
3)开启EUT,使EUT预热10分钟,确认EUT的工作状态,使EUT处于正常工作中。
4)通过发射天线,分别从80-800MHz,800 ~1000 MHz,1400 ~2100 MHz,2100 ~2500 MHz频率范围,使用1kHz、80%的幅度调制的,频率的扫描步进为1%,每个频率的停留时间设置为2s,测试的强度为10V/m的正弦波干扰信号,对EUT进行干扰进行扫描。记录下EUT的工作状态,看EUT是否工作异常。
5)更换发射天线的极化方向,重复步骤3,确保完成天线水平和垂直方向的干扰测试,
6)调整干扰场强,重复步骤4)~步骤5),完成20V/m和100V/m的测试。
通过实验,结果如下(为简化,已将转速显示及电机转动详细的测试结果和记录做了简化描述):
测试1,场强10V/m,天线水平,转速显示正常,转速显示正常
测试2,场强10V/m,天线垂直,转速显示正常,转速显示正常
测试3,场强20V/m,天线垂直,转速显示增大20%,转速加快(185MHz~230MHz频率干扰下)
测试4,场强20V/m,天线垂直,转速显示增大20%,转速加快(185MHz~230MHz频率干扰下)
测试5,场强100V/m,天线垂直,转速显示增大50%,转速严重加快(185MHz~230MHz频率干扰下)
测试6,场强100V/m,天线垂直,转速显示增大50%,转速严重加快(185MHz~230MHz频率干扰下)
三、试验结果分析
我们看到,在方法1中,我们的EUT表现均为正常,但在方法2中,在10V/m的干扰场强下,EUT工作还算正常,但当场强增大到20V/m 时,EUT开始出现异常,当增大到100V/m 时,EUT已经严重失控了。在辐射敏感度试验中,有3个原因:
1.通常线束当了天线的作用,将干扰信号接收进入EUT内部,使得EUT受到干扰。线束作为接收天线会影响收干扰的大小,对方法1,我们是直接将EUT置于木桌上,天线离EUT为3米,线束是布在桌子边缘,试验中是没有暴露1.5m长的。而方法2中,线束彻底的暴露了1.5m长。使用方法2更能模拟EUT的工作环境条件。
2.测试的布置会影响测试的结果,通常线束的朝向和EUT的接地位置会影响试验结果,在本案例中,由于移动的需要,机器人很多都是远端接地。所以在测试时也是需要远端接地。这时候,干扰信号更容易影响EUT。EUT的安装通常都如方法2一样安装,所以方法2更加能模拟EUT的工作布置。
3.干扰场强的大小是最直接的影响因素,干扰越强,对EUT的考验越大。机器人的工作环境是相当复杂的,许多机器人都处于恶劣的电磁环境中,通常在高压线,配电柜,各种信号发射塔,工厂多大型设备环境等各种强辐射环境,其干扰是非常强的,所以机器人受高强度电磁辐射的干扰是比较常见的。
四、结论
对于工业机器人的电磁辐射敏感度试验,我们不仅要满足现有通用标准的要求,那是一个比较低的要求,我们还要按照方法2的要求进行试验摸底,根据机器人可能使用的环境,尽量选择高等级的辐射场强来考核设备,企业才能确保所研发的机器人有较好的电磁兼容性和高可靠性。
参考文献:
[1]国家标准化管理委员会. GB/T 4365-2003. 中国标准出版社
[2]肖南峰. 《智能机器人》 华南理工大学出版社,2008
[3]国际标准化组织. ISO 11452-2-2004 《道路车辆.窄带辐射的电磁能量产生的电子干扰的部件试验方法-电波暗室法》,2004
[4]国家标准化委员会,GB/T17626.3-2006《射频电磁场辐射抗扰度试验》,2006
论文作者:代勇
论文发表刊物:《电力设备》2017年第18期
论文发表时间:2017/11/6
标签:场强论文; 转速论文; 测试论文; 天线论文; 干扰论文; 机器人论文; 标准论文; 《电力设备》2017年第18期论文;